Objetivo: Controlar un carro para que siga una línea en el suelo utilizando sensores y motores.
Componentes: Sensores de línea, motores, controlador (Arduino).
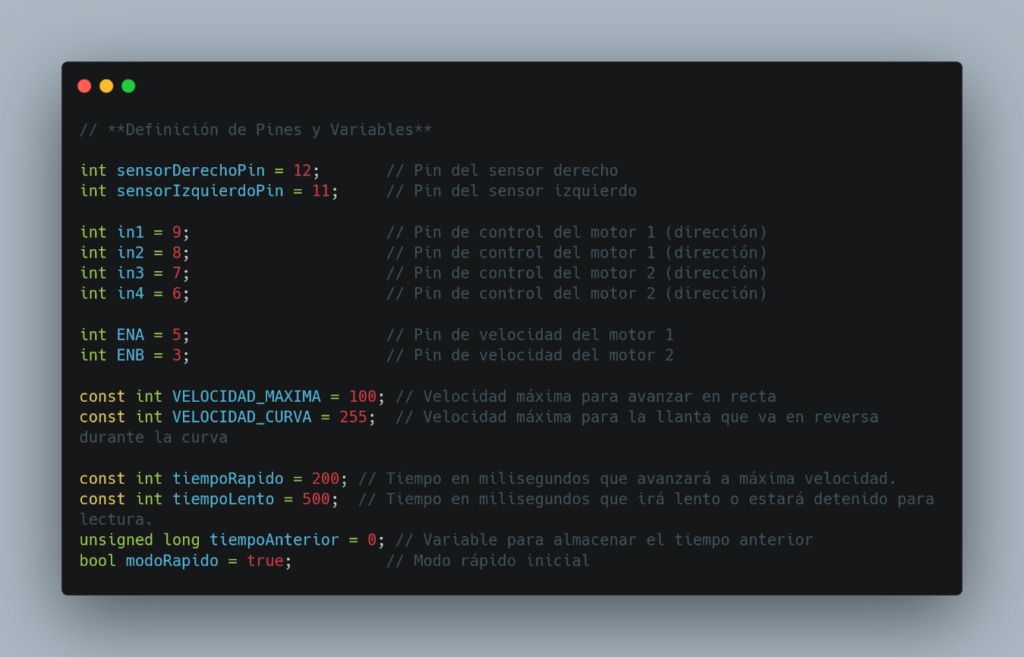
Declaración de variables:
En esta sección se definen los pines de entrada y salida que se conectan a los sensores y motores, y se establecen las constantes para las velocidades y tiempos. El propósito de esta definición es facilitar la configuración del hardware y establecer los parámetros necesarios para el funcionamiento del carro seguidor de línea.
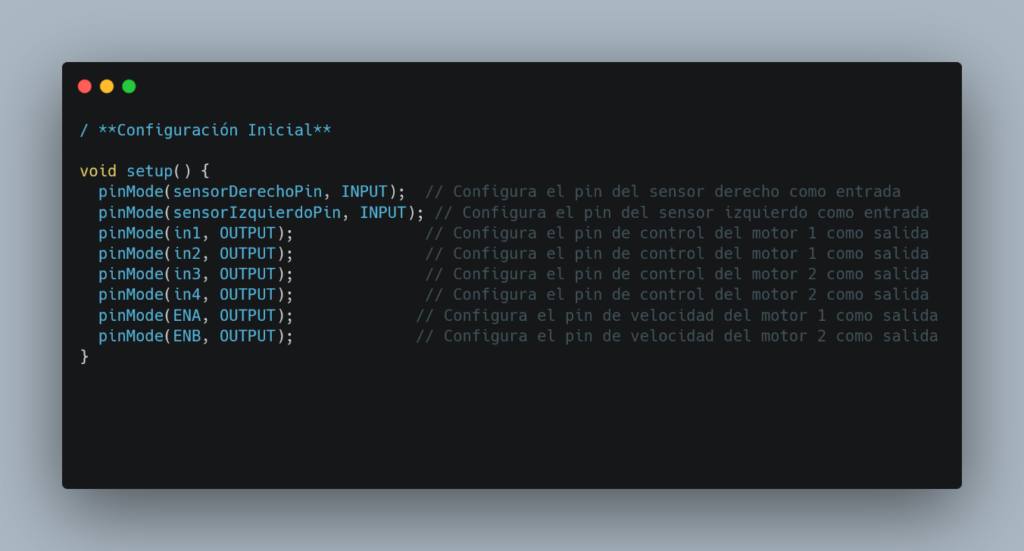
Configuración inicial (setup()):
En la función setup(), se inicializan los pines de entrada y salida y se configuran los modos de operación correspondientes. Esta configuración prepara el sistema para su funcionamiento, asegurando que cada pin esté correctamente configurado para interactuar con el hardware.
Lógica principal (loop()):
La función loop() contiene la lógica que se ejecuta continuamente durante la operación del carro, alternando entre modos rápido y lento, leyendo los valores de los sensores, y controlando los motores en función de estas lecturas. Su propósito es determinar cómo debe actuar el carro basándose en las lecturas de los sensores y el tiempo transcurrido.
Funciones auxiliares:
Las funciones auxiliares definen acciones específicas como detener el carro, avanzar, girar a la derecha y girar a la izquierda. Estas funciones modularizan el código, simplificando la lógica principal y facilitando tanto la lectura como el mantenimiento del código.