Los carros seguidores de línea son ejemplos fascinantes de cómo la tecnología puede ser utilizada para resolver problemas complejos de manera autónoma. Estos robots están diseñados para seguir una línea trazada en el suelo utilizando una combinación inteligente de sensores, microcontroladores y actuadores. Cada componente juega un papel crucial en el funcionamiento general del carro, asegurando que pueda detectar la línea, tomar decisiones en tiempo real y ajustar su trayectoria para mantenerse en curso.
Exploraremos en detalle cada uno de los componentes esenciales que componen un carro seguidor de línea. Desde los sensores ópticos que detectan la pista hasta los microcontroladores que procesan la información. Cada elemento tiene una función específica que contribuye al funcionamiento integral del robot.
COMPONENTES QUE COMFORMAN EL CARRO SEGUIDOR DE LINEA
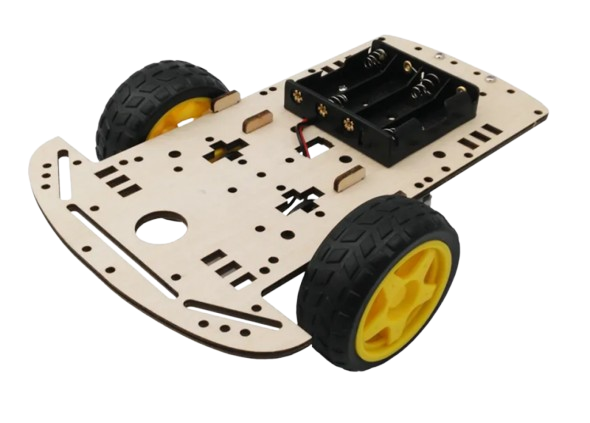
Chasis:
Función: El chasis es la estructura fundamental del carro, diseñado para soportar y montar todos los demás componentes. Proporciona estabilidad y rigidez al vehículo.
Precio estimado: 40.000 - 70.000 pesos
Descripción: Generalmente fabricado en materiales como plástico o metal ligero, el chasis asegura que todos los elementos se mantengan en su lugar y que el carro tenga una base sólida.
Rueda loca:
Función: La rueda loca es una rueda que no impulsa el carro pero permite que el carro cambie de dirección al proporcionar soporte adicional en la parte trasera o delantera.
Precio estimado: 6.500 - 8.000 pesos por unidad
Descripción: Esta rueda ayuda a mantener el equilibrio y la estabilidad durante el movimiento, permitiendo que el carro se dirija correctamente.
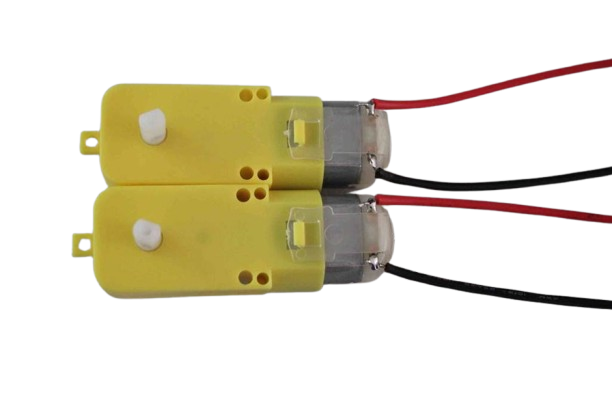
Motorreductor:
Función: Los motores proporcionan la energía necesaria para que el carro se mueva. Controlan la dirección y velocidad del carro al girar las ruedas.
Precio estimado: 6.000 - 10.000 por motor
Descripción: Normalmente se utilizan motores de corriente continua (DC) que se pueden controlar con precisión mediante señales eléctricas. La cantidad de motores necesarios depende del diseño del carro, generalmente dos para las ruedas motrices.
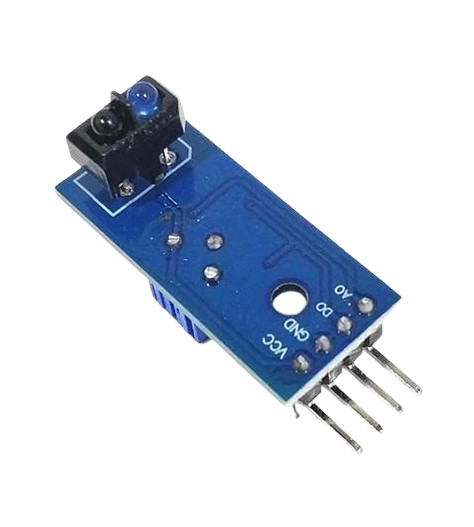
Sensores de linea:
Función: Los sensores actúan como los "ojos" del carro, detectando las variaciones en la intensidad de luz reflejada por la pista. Esto permite al carro seguir una línea trazada en el suelo.
Precio estimado: 6.000 - 15.000 pesos por sensor
Descripción: Estos sensores suelen ser fototransistores o sensores infrarrojos que envían información al microcontrolador sobre la presencia o ausencia de línea en el suelo.
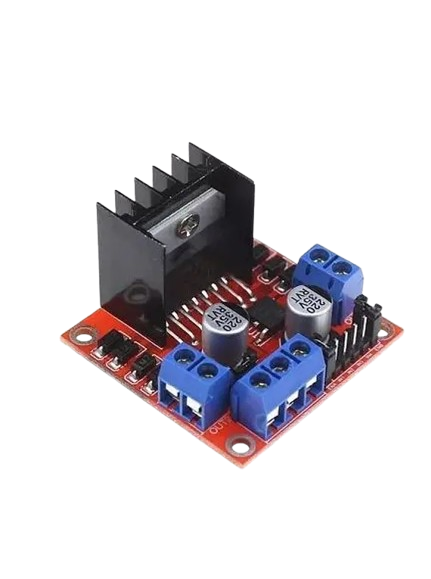
Puente H:
Función: El puente H es un circuito integrado que permite controlar la dirección y velocidad de los motores. Ajusta la carga eléctrica y la dirección de corriente para que los motores giren en el sentido deseado.
Precio estimado: 10.000 - 13.000 pesos por unidad
Descripción: Este componente es esencial para el control preciso del movimiento del carro, permitiendo que se desplace hacia adelante, hacia atrás y gire en diferentes direcciones.
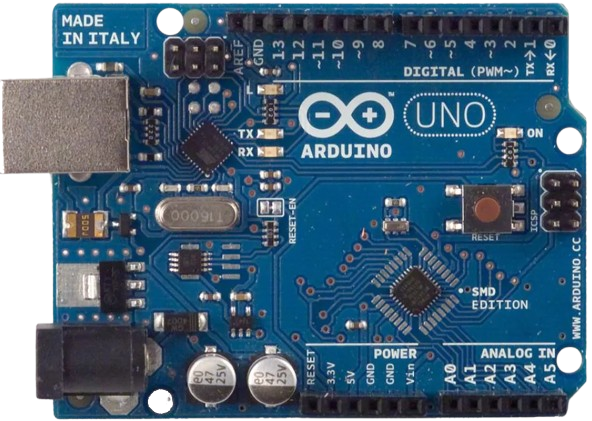
Microcontrolador:
Función: El microcontrolador, como un Arduino, es el cerebro del carro. Recibe la información de los sensores y envía las instrucciones a los motores a través del puente H.
Precio estimado: 50.000 - 70.000 pesos
Descripción: Programable y flexible, el Arduino permite programar las decisiones del carro basadas en la información recibida, ejecutando el algoritmo de seguimiento de línea.
Baterías:
Función: Las baterías son una fuente de energía química que nos permiten alimentar circuitos eléctricos.
Precio estimado: 16.000 – 20.000 unidad 9 voltios y 20.000 - 22.000 4 unidades de baterías AA 1,5V
Descripción: La batería nos permitirá energizar nuestro circuito de nuestro auto seguidor de línea y así poder hacer que funcione.
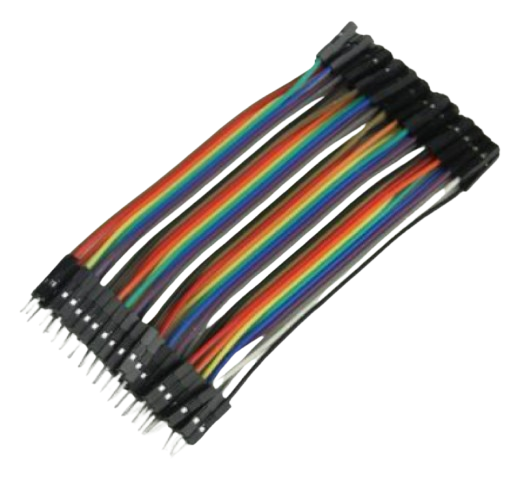
Jumpers:
Función: Los jumpers son cables de conexión que permiten interconectar todos los componentes del carro.
○ Precio estimado: 5.000 - 10.000 pesos por kit
○ Descripción: Estos cables son esenciales para la integración de los diferentes componentes, facilitando la comunicación eléctrica entre el microcontrolador, los sensores, los motores y otros elementos.
Lógica de Control (Software):
El software o programa cargado en el microcontrolador define cómo se interpretan los datos de los sensores y cómo se controlan los motores en respuesta a estos datos. Puede incluir algoritmos de control proporcional, integral y derivativo (PID) para ajustar continuamente la posición del carro respecto a la línea.